(都留キャンパス電子技術科No.479)
こんにちは!いよいよ『パリ2024オリンピック』がスタートしましたね。日本代表選手の活躍が楽しみです。さて、今回は、令和6年7月26日(金)の2限に行われた2年生の授業『制御工学』について紹介します。
この授業では『PLC』を用いて、機械の動作を制御する方法について学んでいます。『PLC』は「Programmable Logic Controller」の略で、製造設備などの機械をプログラムで自動制御するためのコントローラです。『PLC』は、工場の生産ラインから自動販売機まで、さまざまなシーンで活用されています。
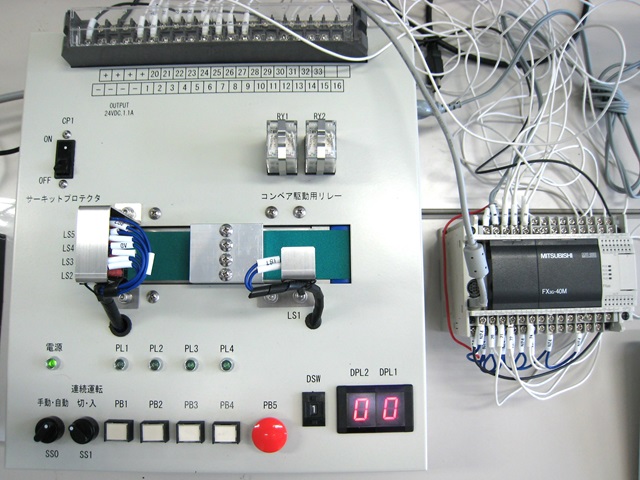
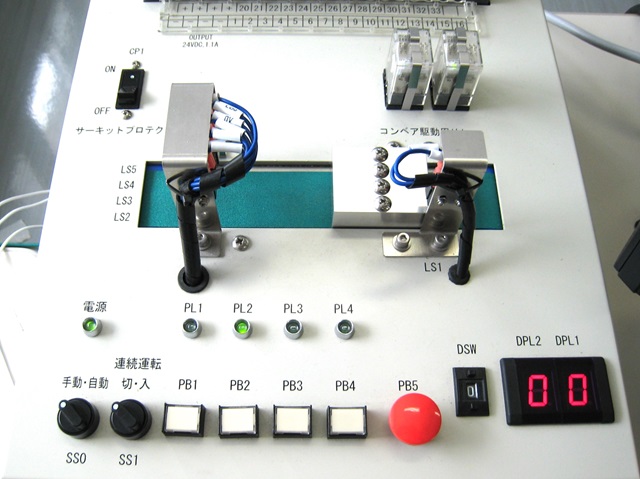
下の写真の右側にあるのが『PLC』です。授業では、製造設備などの機械の代わりに、下の写真の左側にあるトレーニングボードを使用します。このトレーニングボード上にある押しボタンスイッチ、パイロットランプ、小型ベルトコンベアなどと連携して『PLC』のプログラムを設計しながら、『PLC』による機械の制御の方法を学んでいきます。
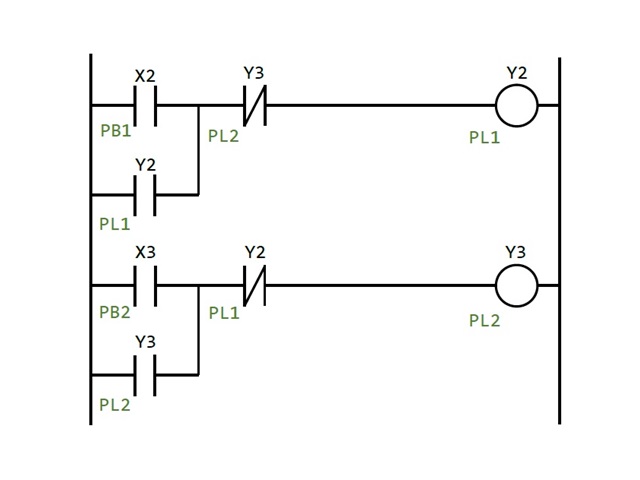
『PLC』のプログラムは、下の写真のような『リレー回路』の形をしています。この形が「はしご」に見えることから『ラダー図』もしくは『ラダープログラム』と呼ばれます。プログラムというより、回路図に近い感じですね。
授業では、これまでに基本的な『ラダー図』として、『論理演算回路』『自己保持回路』『インタロック回路』のほかに・・・

『先行入力優先回路』『新入力優先回路』『直列優先回路』『タイマ回路』などについて、演習問題の『ラダープログラム』を設計したりしながら学んできました。

今回は、夏休み前の最後の授業なので、これまでに学んできたことをふりかえりながら、やり残した演習問題に取り組みました。

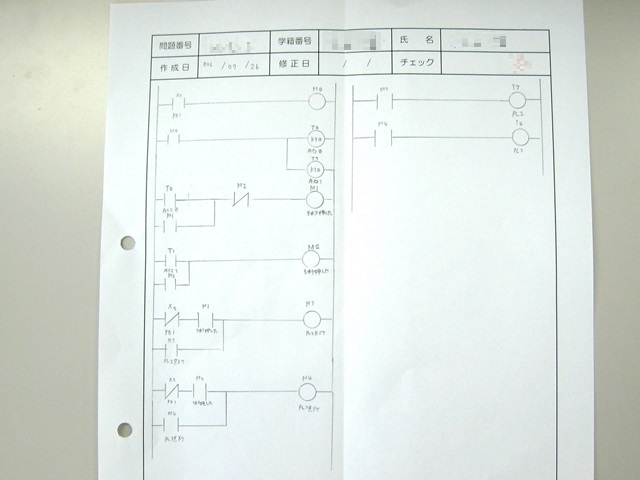
ORくんは、下の写真の演習問題に取り掛かりました。
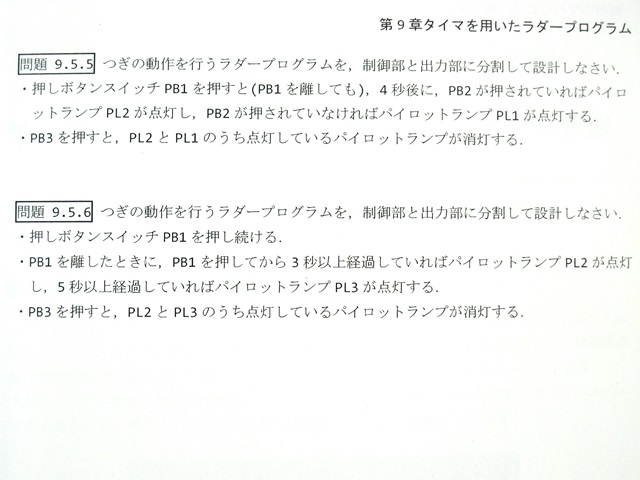
授業で学んだ基本的な回路を組み合わせて、ラダープログラムの設計図を作成していきます。

例えば、設計図はこんな感じになります。
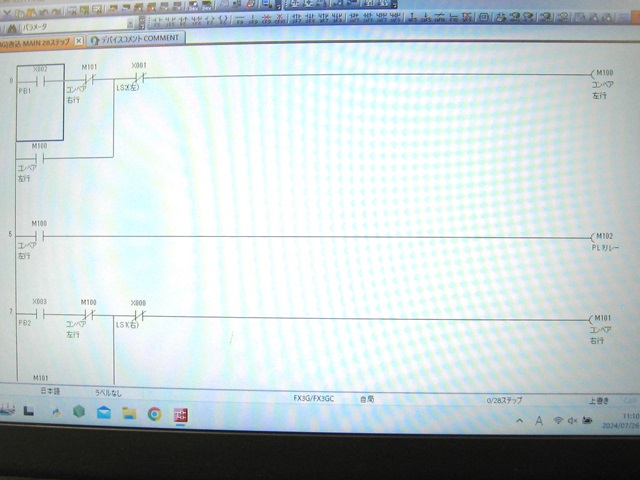
設計図が完成したら、設計図をもとにしてノートPCで専用のアプリを使って、『ラダープログラム』を作成していきます。

入力したラダープログラムはこんな感じになります。
『ラダープログラム』を入力したら、コンパイルして機械語に変換して、ノートPCから『PLC』に書き込みます。

書き込みが完了したら、プログラムを実行し、トレーニングボードを使って『ラダープログラム』が設計どおりに動作するか確認します。
というわけで、このあとも授業は続きました・・・
みんな、今日も1日おつかれさま☆彡
「夏休み明けからは『カウンタ回路』について学んだら、いよいよ『状態遷移図』による『ラダープログラム』の設計について学んでいきます。」
今日も『産業技術短大のTopics』をみてくれてありがとう!
また明日からがんばろっ٩( ‘ω’ )و
それじゃ≡3 ≡3 ≡3
(都留キャンパス電子技術科No.479)
