電子技術科(都留キャンパス) No.499
📅 令和7年10月22日(水)
📍 電子技術科(都留キャンパス)2年生『制御工学』の授業より
➀ こんにちは、高校生のみなさん!
今回ご紹介するのは、電子技術科(都留キャンパス)2年生の授業「制御工学」です。
この授業では、PLC(Programmable Logic Controller)という機械制御用のコントローラを使って、機械を決められた順序で制御するラダープログラムの設計方法を学んでいます。
② 状態遷移図って何?
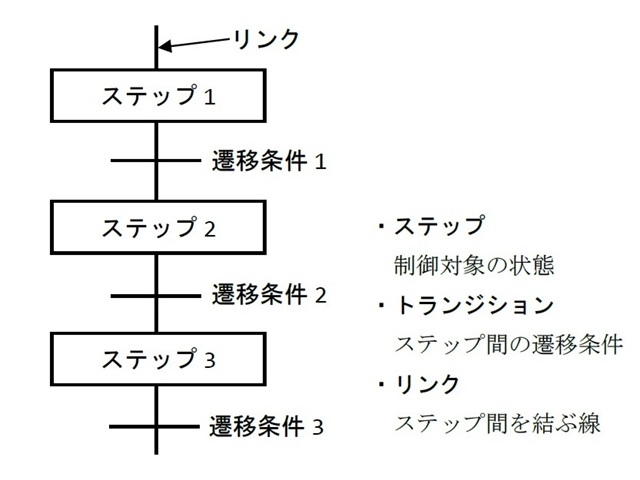
ラダープログラムを設計するために、今回は「状態遷移図」を使いました。
状態遷移図とは、機械の「状態(ステップ)」と「次の状態に移る条件(遷移条件)」を図で表したものです。
フローチャートに似ていて、プログラムの流れがひと目でわかります!
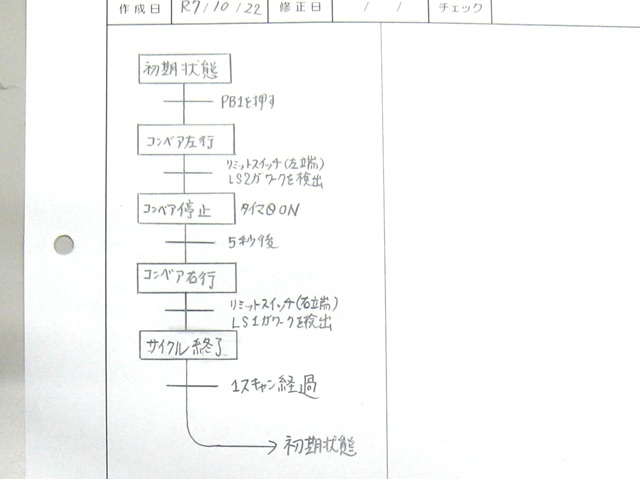
③ コンベアの動きを設計してみよう!
まずは、状態遷移図の描き方を学びながら、例題として、コンベアの順序制御を考えました。
学生たちは、ステップと遷移条件を整理しながら図を描いていきます。

こちらが、完成した状態遷移図になります。
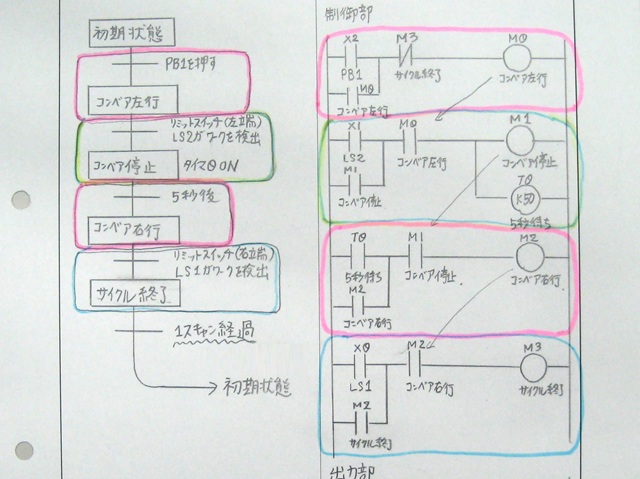
④ ラダープログラムにコーディング!
次は、状態遷移図をもとにラダープログラムを手描きでコーディングしていきます。
図の右側が、左側の状態遷移図をもとにコーディングしたラダープログラムになります。
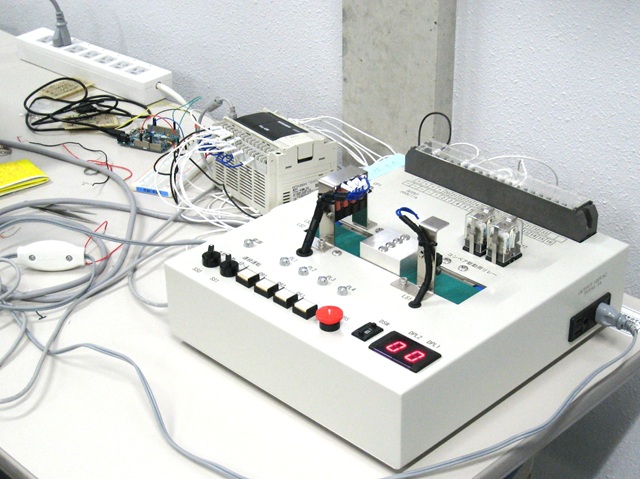
⑤ 実行してみよう!
手描きしたラダープログラムをアプリに入力し、コンパイルして機械語に変換します。

そのあと、PLCに送信して実行すると…
コンベアが設計どおりに動きました!
どうやらうまくいったようです。
⑥ 状態遷移図を使うメリットって?
状態遷移図を使ってラダープログラムを設計すると、入力ミスさえなければ一発で動くラダープログラムが作れます。
しかも、図を見ればプログラムの流れがすぐにわかるので、メンテナンスも簡単!
⑦ 次回の授業は…?
次回は、演習問題にチャレンジしながら、状態遷移図を使った設計方法をさらに深めていきます!
それでは、次回の【授業☆しょ~かい】もお楽しみに!
